Budget
QUBIK RCS
Check the related issue https://gitlab.com/librespacefoundation/qubik/qubik-org/-/issues/18 for results.
Link Budget - Uplink
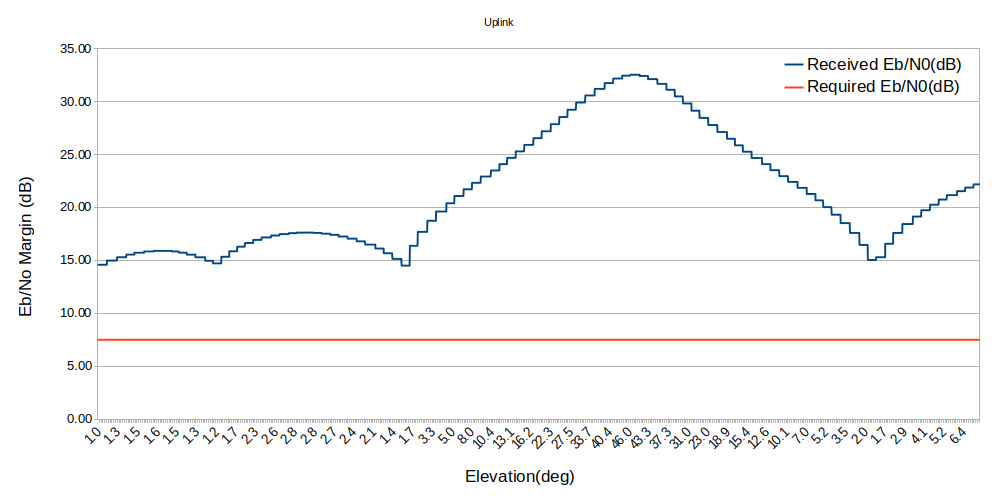
QUBIK uplink budget
Transmitter - Parameters |
Comment |
|
|---|---|---|
Transmitter Frequency (MHz) |
435.24 |
IARU Defined |
Transmitter Power (dBm) |
38.00 |
|
Transmitter Power (dBW) |
8.00 |
Transmitter Power (dBm)-30 |
Antenna circuit loss(RFDN) (dB) |
-2.00 |
TBD |
Antenna gain (dBi) |
14.95 |
Wimo X-Quad UHF |
D3dB antenna (deg) |
36.00 |
|
Pointing accuracy (deg) |
1.00 |
|
EIRP(dBW) |
20.95 |
Transmitter Power (dBW)+RFDN (dB)+Antenna gain (dBi) |
EIRP(dBm) |
50.95 |
Transmitter Power (dBm)+RFDN (dB)+Antenna gain (dBi) |
Path - Parameters |
||
Elevation angle (deg) |
6.96872 |
|
Altitude (km) |
||
Slant Range (km) |
1513.69 |
|
Free Space Loss (dB) |
-148.87 |
gr-leo calculations |
Atmospheric/Ionospheric Loss (dB) |
-1.58 |
gr-leo calculations |
Rainfall Loss (dB) |
-0.003 |
gr-leo calculations |
Total Path Loss (dB) |
-150.45 |
|
Receiver - Parameters |
||
Polarization loss (dB) |
-4.00 |
Assumption |
Pointing loss (dB) |
-3.00 |
From IARU link budget, for Theta2 = 60 deg |
D3dB antenna (deg) |
Omnidirectional |
Dipole Lamda/2 |
Pointing accuracy (deg) |
0.00 |
|
Antenna circuit loss(RFDN) (dB) |
-1.04 |
Connectors, BalUn, cable |
Antenna gain (dBi) |
2.15 |
Dipole Lamda/2 |
Total Antenna Gain(dB) |
-5.89 |
Polarization loss (dB) +Pointing Loss(dB)+RFDN(dB)+Antenna Gain(dBi) |
Antenna Noise Temp (K) |
290.00 |
It is constant 290k for satellite |
Received Signal (dBm) |
-105.39 |
EIRP(dBm) + Total Path Loss (dB) + Total Antenna Gain(dB) |
Receiver - Performance |
||
Front-End NF(dB) |
7.00 |
Assumption from datasheet related with sensitivity for FSK w/o FEC |
Front-End Noise Temp (K) at 290K |
1163.44 |
290(k)*(10^(NF(dB)/10)-1) |
Tsys(K) |
1453.44 |
Antenna Noise Temp (K) + Front-End Noise Temp (K) |
Tsys(dBK) |
31.62 |
10*LOG10(Tsys) |
G/T(dB/K) |
-37.51 |
Total Antenna Gain(dB)-Tsys(dBK) |
Noise Floor (dBm/Hz) |
-166.98 |
10*LOG10(k*1000*Tsys(K)) |
MDS(dBm) |
-114.571736674172 |
Noise Floor(dBm) + 10*LOG10(Required BW(Hz)) |
Symbol rate (samples/s) |
9600.00 |
1200-9600 |
Channel symbol rate (dBHz) |
39.82 |
10*LOG10(Symbol Rate(samples/s)) |
Implementation Loss (dB) |
-1.00 |
|
Received SNR (dB) |
19.18 |
Received Signal (dBm)-(Noise Floor(dBm/Hz)+10*LOG10(Required BW(Hz))) |
Required SNR (dB) |
10.00 |
|
Received Es/N0(dB) |
20.76 |
EIRP(dBW)+Total Path Loss(dB)+G/T(dB/K)+Impl. Loss(dB)-[k(dBW/(K Hz))+Symbol Rate(dBHz)] |
RF Carrier Modulation, Type |
FSK |
|
RF Carrier Modulation, Format |
NRZ-M |
|
User Bit Rate, b/s |
7200.00 |
Symbol Rate(samples/s)*Coding Rate*LOG2(Symbol M-arity) |
Bit Error Rate |
10^-5 |
ECSS-E-HB-50A |
Data Coding, Type |
RS(255,223) |
We need for RS(255,223) concatenated or RS(128,96) |
Required Bandwidth (Hz) |
17400.00 |
Set by AX5043 |
Symbols M-arity |
2.00 |
Due to FSK |
Coding rate |
0.75 |
For FSK and RS(255,223) |
Received Eb/N0(dB) |
22.01 |
Es/N0(Rx) -10*LOG10(LOG2(M))-10*LOG10(Coding Rate) |
Required Eb/N0(dB) |
7.50 |
Minus 2.5 from unencoded FSK-2 |
Margin (dB) |
14.51 |
Received Eb/N0(dB)-Required Eb/N0(dB) |
Spreadsheet calculator (it is better to download it)
Link Budget - Downlink
TBD
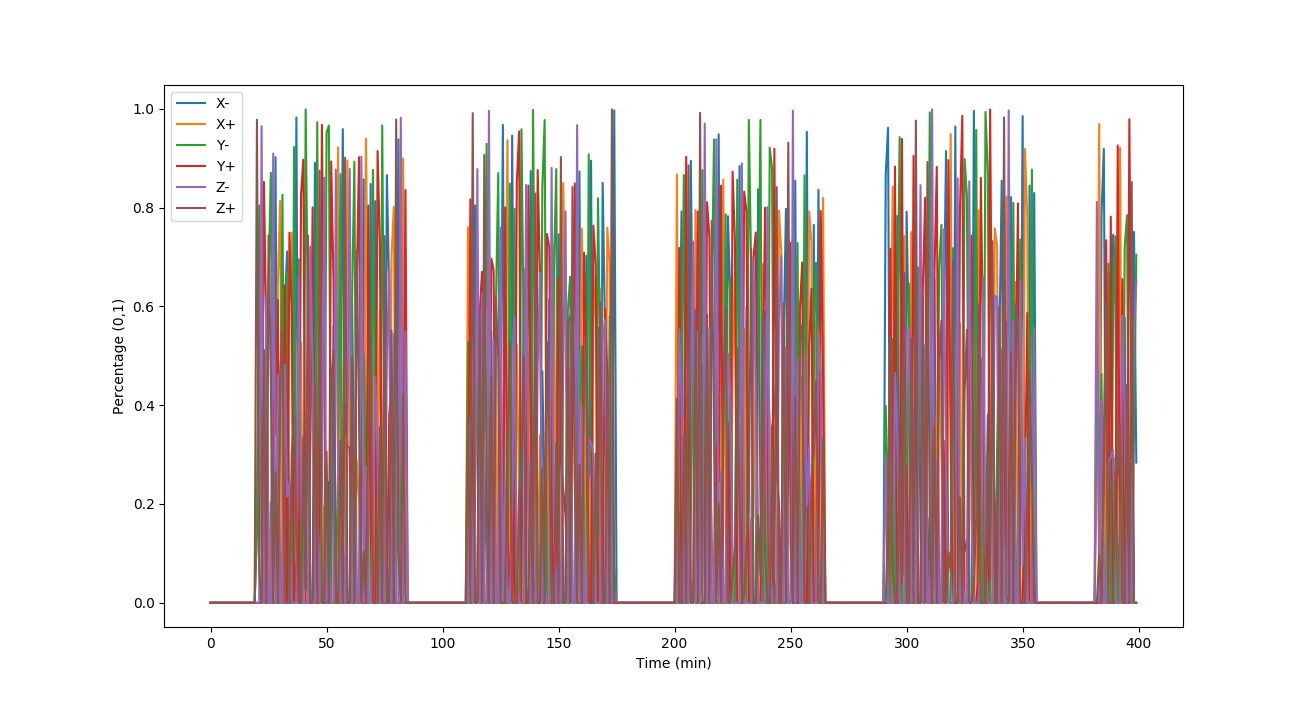
Energy Harvesting Power Budget
By using a python script to calculate the power coefficient and finally the power production of a satellite.
Inputs:
# Put TLE
line1 = ('1 84001U 20001.00000000 .00000000 00000-0 50000-4 0 08')
line2 = ('2 84001 97.0000 156.0000 0001497 0.0000 124.0000 15.90816786 02')
satellite = twoline2rv(line1, line2, wgs72)
# Set the start day for simulation, Julian day
JD_ini = jday(2020, 4, 15, 8, 20, 0)
# Initialize parameters
total_time = 400 # in min
# Initialize angular velocities in rad/min
w_body = np.array([30.0, 10.0, 25.0])
# Initial angle conditions in deg
angle_body_curr = np.deg2rad([0.0, 0.0, 0.0])
# PV efficient in each side [xp, xm, yp, ym, zp, zm]
pv_eff = np.array([0.25, 0.25, 0.25, 0.25, 0.25, 0.25])
# Number of PV in each side [xp, xm, yp, ym, zp, zm]
pv_num = np.array([3.0, 3.0, 3.0, 3.0, 3.0, 3.0])
# Active area of each PV in mm^2, e.g. 45mmx15mm
pv_area = np.array([(45.0*15.0), (45.0*15.0), (45.0*15.0), (45.0*15.0),
(45.0*15.0), (45.0*15.0)])
# Solar irradiance (kW/m^2) in a specific orbit
si = 1.4
Note: solar cell is https://waf-e.dubudisk.com/anysolar.dubuplus.com/techsupport@anysolar.biz/O18Ae0B/DubuDisk/www/Gen3/SM141K04LV%20DATA%20SHEET%20202007.pdf
Results:
Mean Power coefficient of each side, [Xp_m, Xm_m, Yp_m, Ym_m, Zp_m, Zm_m]: [0.16756193891221607, 0.17041088209246041, 0.19111270153573892, 0.19375282007969838, 0.15851510079365622, 0.15893245086986432]
Total Mean Power coefficient, 1.0402858942836344
Mean Power of each side in mW, [Xp_m, Xm_m, Yp_m, Ym_m, Zp_m, Zm_m]: [118.7595242 , 120.77871268, 135.45112721, 137.32231123, 112.34757769, 112.64337455]
Total Mean Power in mW, 737.3026275735258
For 400 minutes or ~4 orbits
QUBIK Power Budget
Power Budget
TBD
Data Budget
TBD
Mass Budget
TBD
Pointing Budget
Not applicable to QUBIK satellite due to missing determination and control attitude system.